行業資訊
您當前的位置:首頁 > 新聞資訊 > 行業資訊 > 原子力顯微鏡的原理
原子力顯微鏡的原理
一、原理
原子力顯微鏡(Atomic Force Microscopy, AFM)是由IBM 公司的Binnig與史丹佛大學的Quate 于一九八五年所發明的,其目的是為了使非導體也可以采用掃描探針顯微鏡(SPM)進行觀測。
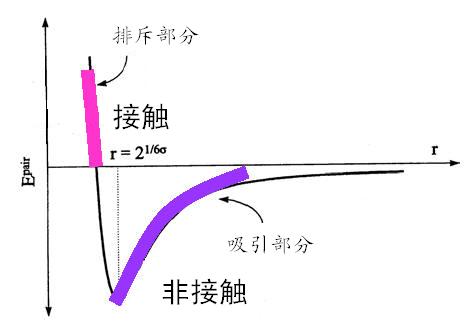
1、原子與原子之間的交互作用力因為彼此之間的距離的不同而不同,其之間的能量表示也會不同。
原子力顯微鏡(AFM)與掃描隧道顯微鏡(STM)最大的差別在于并非利用電子隧道效應,而是利用原子之間的范德華力(Van Der Waals Force)作用來呈現樣品的表面特性。假設兩個原子中,一個是在懸臂(cantilever)的探針尖端,另一個是在樣本的表面,它們之間的作用力會隨距離的改變而變化,其作用力與距離的關系如“圖1” 所示,當原子與原子很接近時,彼此電子云斥力的作用大于原子核與電子云之間的吸引力作用,所以整個合力表現為斥力的作用,反之若兩原子分開有一定距離時,其電子云斥力的作用小于彼此原子核與電子云之間的吸引力作用,故整個合力表現為引力的作用。若以能量的角度來看,這種原子與原子之間的距離與彼此之間能量的大小也可從Lennard –Jones 的公式中到另一種印證。
為原子的直徑
為原子之間的距離
從公式中知道,當r降低到某一程度時其能量為+E,也代表了在空間中兩個原子是相當接近且能量為正值,若假設r增加到某一程度時,其能量就會為-E 同時也說明了空間中兩個原子之距離相當遠的且能量為負值。不管從空間上去看兩個原子之間的距離與其所導致的吸引力和斥力或是從當中能量的關系來看,原子力式顯微鏡就是利用原子之間那奇妙的關系來把原子樣子給呈現出來,讓微觀的世界不再神秘。
在原子力顯微鏡的系統中,是利用微小探針與待測物之間交互作用力,來呈現待測物的表面之物理特性。所以在原子力顯微鏡中也利用斥力與吸引力的方式發展出兩種操作模式:
(1)利用原子斥力的變化而產生表面輪廓為接觸式原子力顯微鏡(contact AFM ),探針與試片的距離約數個?。
(2)利用原子吸引力的變化而產生表面輪廓為非接觸式原子力顯微鏡(non-contact AFM ),探針與試片的距離約數十個? 到數百個?。
二、原子力顯微鏡的硬件架構:
在原子力顯微鏡(Atomic Force Microscopy,AFM)的系統中,可分成三個部分:力檢測部分、位置檢測部分、反饋系統。
2、原子力顯微鏡(AFM)系統結構
2.1 力檢測部分:
在原子力顯微鏡(AFM)的系統中,所要檢測的力是原子與原子之的范德華力。所以在本系統中是使用微小懸臂(cantilever)來檢測原子之間力的變化量。這微小懸臂有一定的規格,例如:長度、寬度、彈性系數以及針尖的形狀,而這些規格的選擇是依照樣品的特性,以及操作模式的不同,而選擇不同類型的探針。
2.2 位置檢測部分:
在原子力顯微鏡(AFM)的系統中,當針尖與樣品之間有了交互作用之后,會使得懸臂cantilever擺動,所以當激光照射在cantilever的末端時,其反射光的位置也會因為cantilever擺動而有所改變,這就造成偏移量的產生。在整個系統中是依靠激光光斑位置檢測器將偏移量記錄下并轉換成電的信號,以供SPM控制器作信號處理。
2.3 反饋系統:
在原子力顯微鏡(AFM)的系統中,將信號經由激光檢測器取入之后,在反饋系統中會將此信號當作反饋信號,作為內部的調整信號,并驅使通常由壓電陶瓷管制作的掃描器做適當的移動,以保持樣品與針尖保持合適的作用力。
原子力顯微鏡(AFM)便是結合以上三個部分來將樣品的表面特性呈現出來的:在原子力顯微鏡(AFM)的系統中,使用微小懸臂(cantilever)來感測針尖與樣品之間的交互作用,這作用力會使cantilever擺動,再利用激光將光照射在cantilever的末端,當擺動形成時,會使反射光的位置改變而造成偏移量,此時激光檢測器會記錄此偏移量,也會把此時的信號給反饋系統,以利于系統做適當的調整,最后再將樣品的表面特性以影像的方式給呈現出來。
激光檢測原子力顯微鏡
原子力顯微鏡的基本原理是:將一個對微弱力極敏感的微懸臂一端固定,另一端有一微小的針尖,針尖與樣品表面輕輕接觸,由于針尖尖端原子與樣品表面原子間存在極微弱的排斥力,通過在掃描時控制這種力的恒定,帶有針尖的微懸臂將對應于針尖與樣品表面原子間作用力的等位面而在垂直于樣品的表面方向起伏運動。利用光學檢測法或隧道電流檢測法,可測得微懸臂對應于掃描各點的位置變化,從而可以獲得樣品表面形貌的信息。下面,我們以激光檢測原子力顯微鏡(Atomic Force Microscope Employing Laser Beam Deflection for Force Detection, Laser-AFM)——掃描探針顯微鏡家族中最常用的一種為例,來詳細說明其工作原理。
3. 激光檢測原子力顯微鏡探針工作示意圖
如圖3所示,二極管激光器(Laser Diode)發出的激光束經過光學系統聚焦在微懸臂(Cantilever)背面,并從微懸臂背面反射到由光電二極管構成的光斑位置檢測器(Detector)。在樣品掃描時,由于樣品表面的原子與微懸臂探針尖端的原子間的相互作用力,微懸臂將隨樣品表面形貌而彎曲起伏,反射光束也將隨之偏移,因而,通過光電二極管檢測光斑位置的變化,就能獲得被測樣品表面形貌的信息。 在系統檢測成像全過程中,探針和被測樣品間的距離始終保持在納米(10 -9 米)量級,距離太大不能獲得樣品表面的信息,距離太小會損傷探針和被測樣品,反饋回路(Feedback)的作用就是在工作過程中,由探針得到探針-樣品相互作用的強度,來改變加在樣品掃描器垂直方向的電壓,從而使樣品伸縮,調節探針和被測樣品間的距離,反過來控制探針-樣品相互作用的強度,實現反饋控制。因此,反饋控制是本系統的核心工作機制。 本系統采用數字反饋控制回路,用戶在控制軟件的參數工具欄通過以參考電流、積分增益和比例增益幾個參數的設置來對該反饋回路的特性進行控制。
相關新聞



 專業產品
專業產品